Software de Mapeo y Navegación
DESCRIPCIÓN
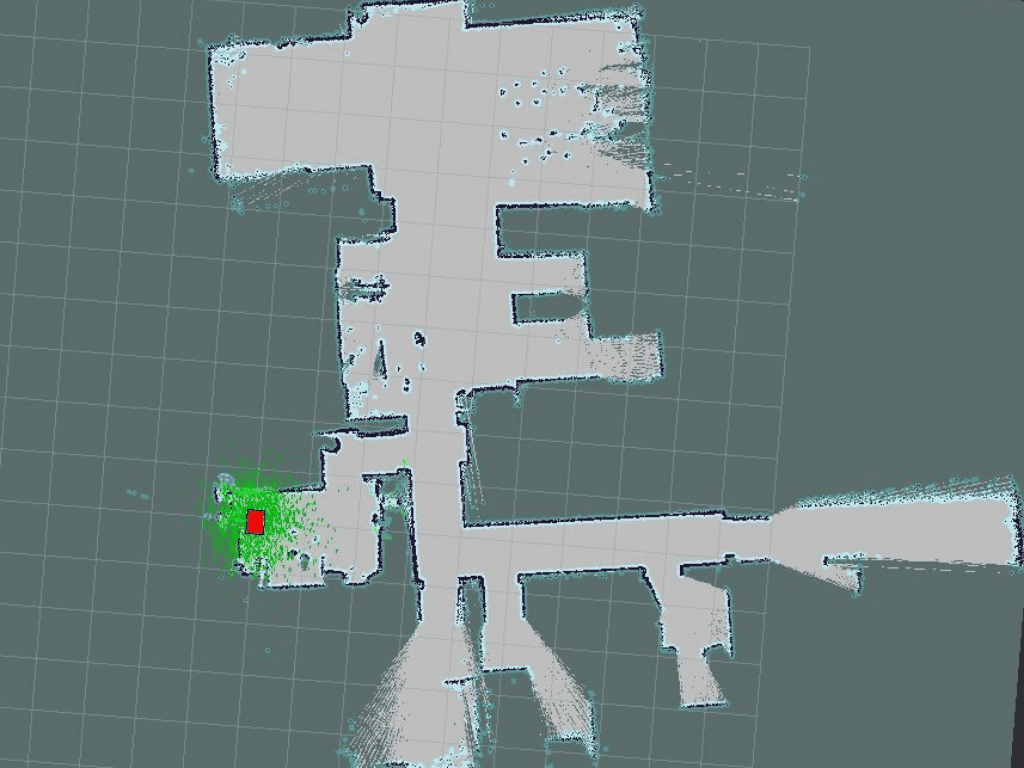
Este software está basado en el sistema de navegación natural mediante laser scanner, esto significa que no hay cables, cintas o marcas de navegación en el entorno y la navegación es por referencia de las características de la zona de trabajo.
Algoritmos de escaneo de superficies y mapeo genera el mapa de navegación con las características del entorno de trabajo. Estas características son usadas para determinar la posición del vehículo durante la operación.
INFORMACIÓN
- Fecha:
10 Marzo 2021
Área Técnica:
Software